GPS-Denied Navigation
USU researchers have developed a navigation system that uses measurements from detected landmarks or objects to provide an estimated global position.
Problem
Traditionally, GPS signals have guided autonomous vehicles, the use of which is becoming increasingly common in various industries. However, GPS is unavailable in some environments. For example, in agricultural settings such as orchards and vineyards where the interest in autonomous navigation is significant and growing, GPS signals can be obstructed by tree canopies or vineyard rows. This has created a need for navigation systems that can operate without GPS signals.
Solution
The technology detects changes in continuous features (e.g., roads, mountain ridges, riverbends) and/or locations of discrete features (e.g., trees, power poles) for location range and bearing measurements. It combines those with changes in inertia (measured by a standard inertial measurement unit) to produce location estimates. The method can even be applied to moving surfaces, such as waves.
Benefits
- Navigation in GPS-denied environments, including those without an available database of reference feature locations.
- Reduces the need for communication between the vehicle and reference feature locations, enabling autonomous vehicle technologies.
- The technology can be scaled without significant increases in hardware requirements.
Applications
- Precision agriculture, including modeling and mapping of orchards, vineyards.
- Military and civilian applications generally, on land and over oceans.
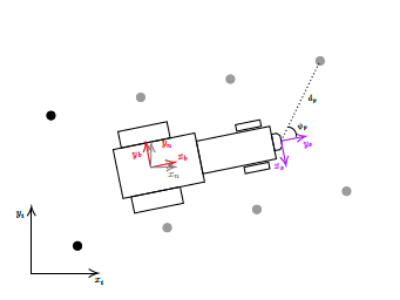
Coordinate system description defining an inertial frame (black), navigation frame (gray), body frame (red), and sensor frame (blue). The measurement from the pole detection algorithm is shown by a dotted line.
Contact
Questions about this technology including licensing availability can be directed to:
Alan Edwards, MA, JD
Manager, Technology Transfer Services
(435) 797-2328 alan.edwards@usu.edu
USU ID C20047
Development Stage
3
Patent Status
Patent Applied For
Publications
"Landmark Aided GPS-Denied Navigation for Orchards and Vineyards" - 2020 IEEE/ION Position, Location and Navigation Symposium